Like all of this week, today is an insertion into the standard syllabus of first-semester calculus to provide some tools needed by physics to describe a world of more than one dimension. The first topic, polar coordinates, is traditionally treated somewhere later in the calculus sequence. The second topic, polar unit vectors, doesn't appear at all in most calculus textbooks. Nevertheless, this is the logical place for us to introduce it in both math and physics classes. We will come back to it next semester in physics class and a math lab.
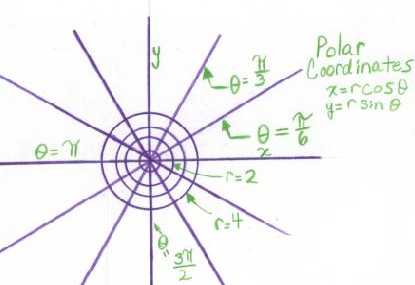
In this way we arrive at the polar coordinate system in the plane. By definition, r is the distance of our variable point from the origin, and Ð is the angle between the positive x axis and the vector representing the point.
Note: Since the Web does not yet speak Greek easily, we will use the Icelandic letter Ð for "theta".
The formulas expressing the Cartesian coordinates of the point in terms of the polar coordinates are (by elementary trigonometry)
x = r cos Ð, y = r sin Ð. (1)
Going back the other way is slightly more complicated. Finding r is easy: Squaring both of equations (1) and adding and taking the square root (or just remembering the formula for the distance between two points) you find
r = (x2 + y2)1/2. (2)
But finding Ð raises some technicalities. Dividing the second of equations (1) by the first, we get
tan Ð = y/x. (3)
If you already know about the inverse tangent function (Stewart Sec. 6.6), you may be tempted to write
Ð = arctan y/x = tan-1 y/x,
but this is not quite correct. Read more about the technicalities of defining theta. (not yet available)
In other words, we want to replace the satellite's private Cartesian coordinate system by a rotated coordinate system. This is the same as the orthogonal basis problems we looked at on day 6.1, with the added complication that the new orthogonal basis now varies from point to point in space. At each point, we need to find a pair of orthogonal unit vectors, one pointing in the radial direction and the other in the direction of increasing theta; and then we need to practice decomposing an arbitrary vector into components along those two basis vectors.
It is important to distinguish this calculation from another one that also involves polar coordinates. Given a vector v = < vx, vy>, we could represent it by its polar coordinates, using formulas like (1)-(3) above, but with vx and vy in place of x and y. (Then the analogue of r would be the speed of the satellite, if v is the velocity.) That is sometimes a very useful thing to do, but it is not what we are talking about now.
Here is a picture of what we are talking about now, for the case where the point r = (x,y) is in the first quadrant. The formulas we derive from it will actually be correct in all four quadrants, as you can check.
[insert drawing] (not yet available)
Let the point r have polar coordinates (r,Ð) (related to (x,y) by equations (1)-(3)). We want ir to be a unit vector at r pointing in the direction of increasing r, and iÐ to be a unit vector at r pointing in the direction of increasing Ð. We specify these vectors, as usual, by listing their ordinary Cartesian components; that is, finding equations of the form ir = < a1, a2> = a1i + a2j. However, the components a1 and a2 will be functions of r and Ð, because what is meant by "the direction of increasing r," etc., varies from point to point!
Method 1: We can find these polar unit vectors by geometric and trigonometric reasoning.
ir = r/r = < cos Ð, sin Ð>. (4)
iÐ = < - sin Ð, cos Ð> (5)
or its negative. It is clear from the drawing that (5) is the vector with the correct overall sign.
Method 2: Here is a more systematic approach, using the concept of tangent vector.
x = r cos Ð, y = r sin Ð,
with Ð regarded as a constant. Thus the tangent vector is
< dx/dr, dy/dr> = < cos Ð, sin Ð>.
This is already a unit vector, so it is the desired ir. This reproduces the result (4).
< dx/dÐ, dy/dÐ> = < - r sin Ð, r cos Ð>.
This is not a unit vector: it has length r. (This is not surprising geometrically, if we think of the tangent vector as the velocity, with Ð as time. If r is greater than 1, then a little change in Ð goes a long way; the moving point must move fast in order to get all around the circle in time 2*Pi. If r is smaller than 1, a given change in Ð produces only a small movement of the point, dwindling to no motion at all when r = 0.) Dividing by the length produces the unit vector iÐ found in (5).
Challenge problem: Define coordinates u and v by
x = (u2 - v2)/2, y = uv.
Now that we have the polar unit vectors, we can express other vectors in terms of them. Let us consider the constant vector
E = < 3, -1> = 3i - j.
Since ir is a unit vector, the vector projection of E onto ir is
(E.ir)ir = (3 cos Ð - sin Ð)ir.
Similarly, the component of E along iÐ is
- (3 sin Ð + cos Ð) iÐ.
Since the polar unit vectors are an orthogonal basis, the sum of these two vectors is the decomposition of E into its components in the radial and angular directions (which is the goal of our calculation in this example):
E = (3 cos Ð - sin Ð)ir - (3 sin Ð + cos Ð) iÐ.
By substituting the formulas (4) and (5) for the polar unit vectors into this equation and simplifying, you can verify that the equation is correct.
Although E is a constant vector (not a function of the point r), its decomposition does depend on the coordinates of the point. Actually, we notice that it depends on Ð but not on r. Can you explain that geometrically?